Updates: The CL NUI Platform Official 1.0 Release; now supports multiple Kinect cameras, signed driver and much more…
You can review the updates here to get started using the SDK Samples and more.
~~~ Nov 16th ~~~
We are proud to release the first preview release of the new CL NUI Platform which consists of an SDK, API and a stable driver for Microsoft’s new Kinect Hardware (Xbox NUI Audio, NUI Camera, NUI Motor and Accelerometer) devices on Windows machines.
To start we have a WPF/C# (.NET 3.5) Visual Studio 2010 Sample Applications as well as C API (CLNUIDevice.h, DLL, LIB) and plan on extending the SDK similar to our CL Eye SDK which has Samples for C/C++/C#, Java and DirectShow.
Learn more about the platform or download the latest installer to get started…
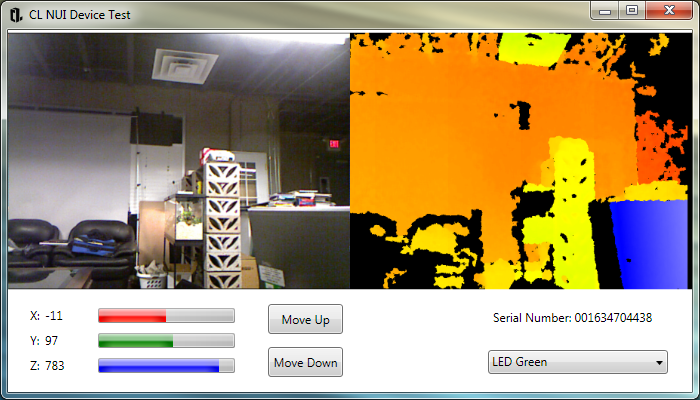
Video/Screenshot of the Sample WPF Application - 2 Cameras 640x480@30FPS, NUI Motor/Accelerometer and LED Control:
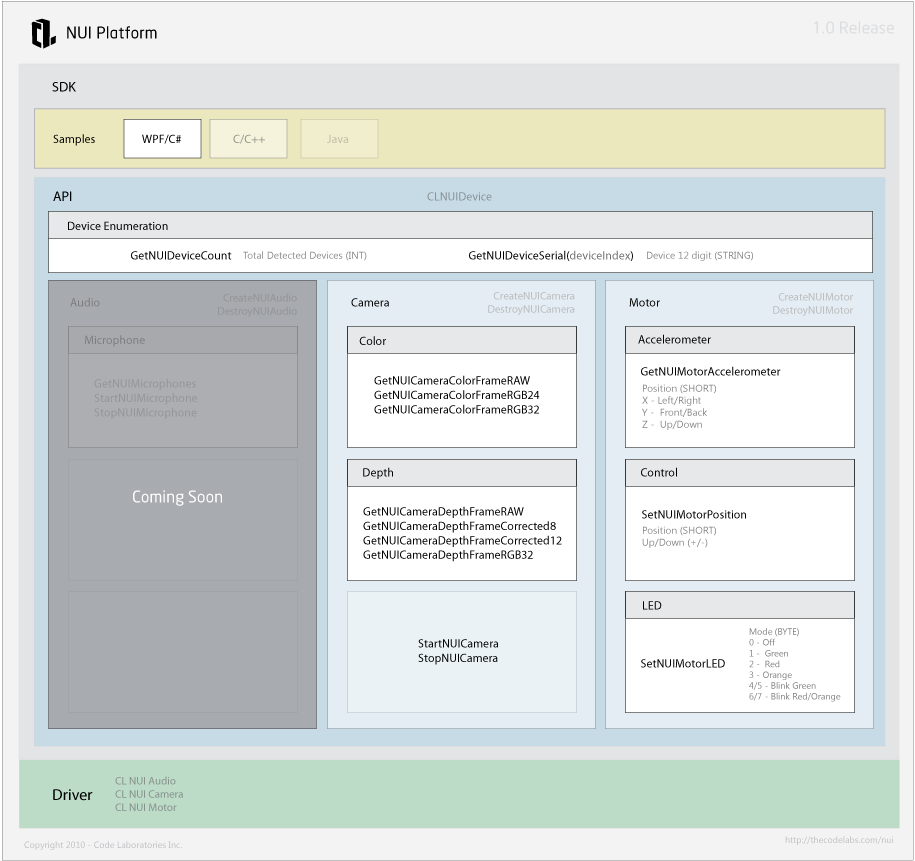
An overview of the platform:
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
//
// This library is part of CL NUI SDK
// It allows the use of Microsoft Kinect cameras in your own applications
//
// For updates and file downloads go to: http://codelaboratories.com/get/kinect
//
// Copyright 2010 (c) Code Laboratories, Inc. All rights reserved.
//
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
#pragma once
#include <windows.h>
#define IMPORT(type) extern "C" __declspec(dllimport)## type __cdecl
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
// NUIDevice API
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
// Device enumeration
IMPORT(int) GetNUIDeviceCount();
IMPORT(PCHAR) GetNUIDeviceSerial(int index);
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
// CLNUIMotor API
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
// Motor instance type
typedef void *CLNUIMotor;
// Library initialization
IMPORT(CLNUIMotor) CreateNUIMotor(PCHAR serial);
IMPORT(bool) DestroyNUIMotor(CLNUIMotor mot);
// Motor control
IMPORT(bool) SetNUIMotorPosition(CLNUIMotor mot, SHORT position);
// Get accelerometer data
IMPORT(bool) GetNUIMotorAccelerometer(CLNUIMotor mot, SHORT &x, SHORT &y, SHORT &z);
IMPORT(bool) SetNUIMotorLED(CLNUIMotor mot, BYTE value);
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
// CLNUICamera API
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
// Camera instance type
typedef void *CLNUICamera;
// Library initialization
IMPORT(CLNUICamera) CreateNUICamera(PCHAR serial);
IMPORT(bool) DestroyNUICamera(CLNUICamera cam);
// Camera capture control
IMPORT(bool) StartNUICamera(CLNUICamera cam);
IMPORT(bool) StopNUICamera(CLNUICamera cam);
// Camera video frame image data retrieval
IMPORT(bool) GetNUICameraColorFrameRAW(CLNUICamera cam, PBYTE pData, int waitTimeout = 2000);
IMPORT(bool) GetNUICameraColorFrameRGB24(CLNUICamera cam, PBYTE pData, int waitTimeout = 2000);
IMPORT(bool) GetNUICameraColorFrameRGB32(CLNUICamera cam, PDWORD pData, int waitTimeout = 2000);
// Camera depth frame image data retrieval
IMPORT(bool) GetNUICameraDepthFrameRAW(CLNUICamera cam, PUSHORT pData, int waitTimeout = 2000);
IMPORT(bool) GetNUICameraDepthFrameCorrected12(CLNUICamera cam, PUSHORT pData, int waitTimeout = 2000);
IMPORT(bool) GetNUICameraDepthFrameCorrected8(CLNUICamera cam, PBYTE pData, int waitTimeout = 2000);
IMPORT(bool) GetNUICameraDepthFrameRGB32(CLNUICamera cam, PDWORD pData, int waitTimeout = 2000);
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
Thanks and please share any videos of it in use or feedback while getting started with the CL NUI Platform.
AlexP
